自动摘要: 前言 在入职至今的两个多月中,我主要负责的内容为强化学习排牙 强化学习排牙缺陷 只在二维上完成,角度以及碰撞问题还有缺陷。 后续期望 在三维上完成。 个人遗憾 没有在 ……..
前言
在入职至今的两个多月中,我主要负责的内容为强化学习排牙
强化学习排牙缺陷
只在二维上完成,角度以及碰撞问题还有缺陷。
后续期望
在三维上完成。
个人遗憾
没有在三维上完成
对AI组的期望
在入职至今的两个半月中,十分感谢各位组员的指导帮助。从我的工作过程中感受到的,我觉得也许可以改变的一些地方,比如对自己写的函数加一些注释,因为每个项目在后续大多都会有其他的人使用或参与进来,添加一些有效的注释有助于他人的理解与使用,能够有效提高合作效率或是接手项目的效率。若是为了保证代码简洁不便添加的话可以在API文档内添加注意事项,特别是一些对输入数据格式等有要求的函数。最后,希望AI组的各位能完成自己的项目,不留遗憾。
相关代码
test3.pytest4.pytest5.pytest6.pytest7.pytest8.pytest9.pytest10.pytest11.pytest12.pytest13.pytest14.pytest15.pymain.pymethod.pynew.pysource.txttarget.txttest.py
test2.py
实践-杨新补充:
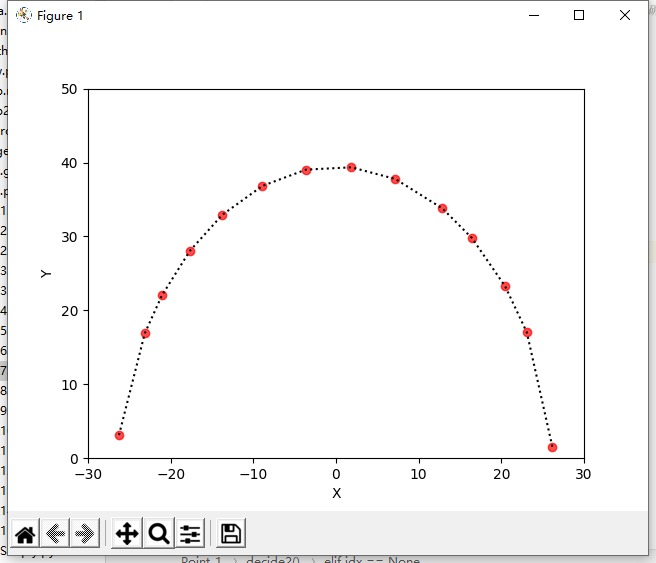
- 2d移动点到目标点
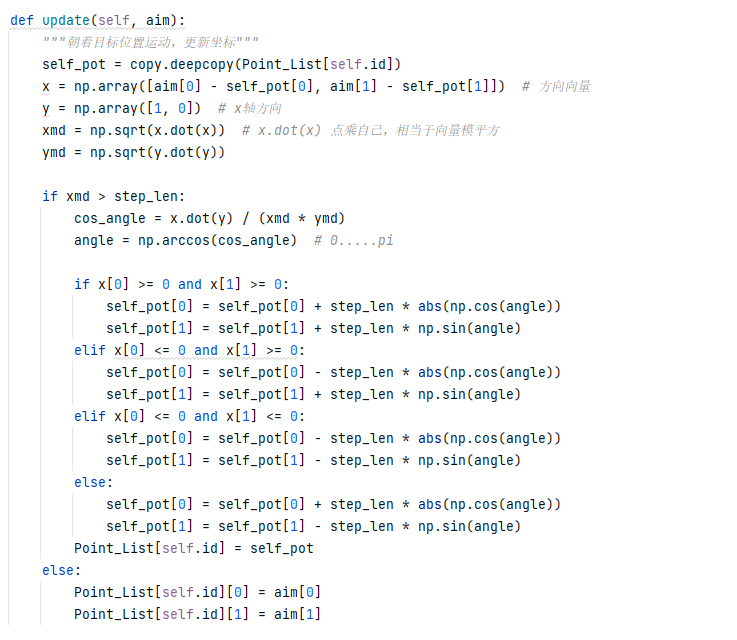
- 目标点可以随机生成也可以由具体数据得到,点的具体移动原理是向离自己最近的点移动,根据两点之间的距离公式计算出每一个原点离所有目标点的距离
- 循环遍历每一个点 朝自己最近的目标点移动 如果移动过程中目标点被占领 则在其他目标点中选一个最近的作为新的目标点
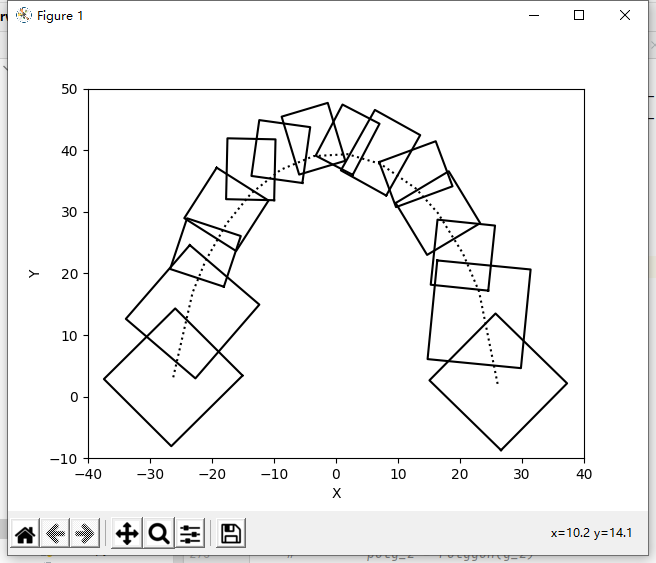
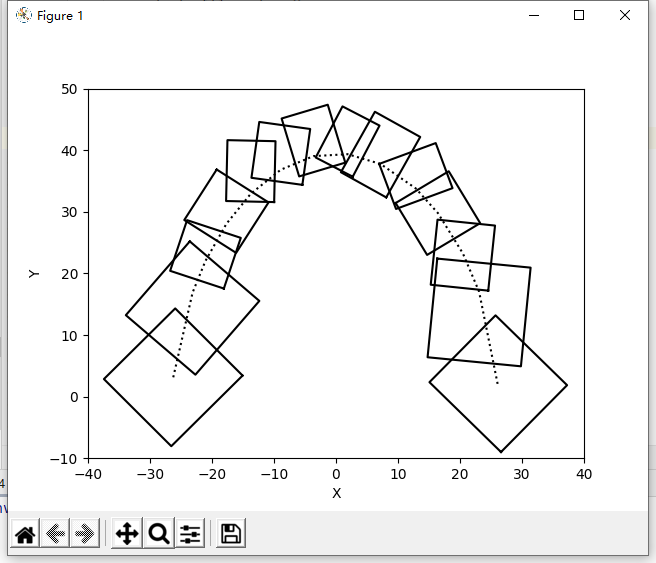
- 生成包围框
包围框
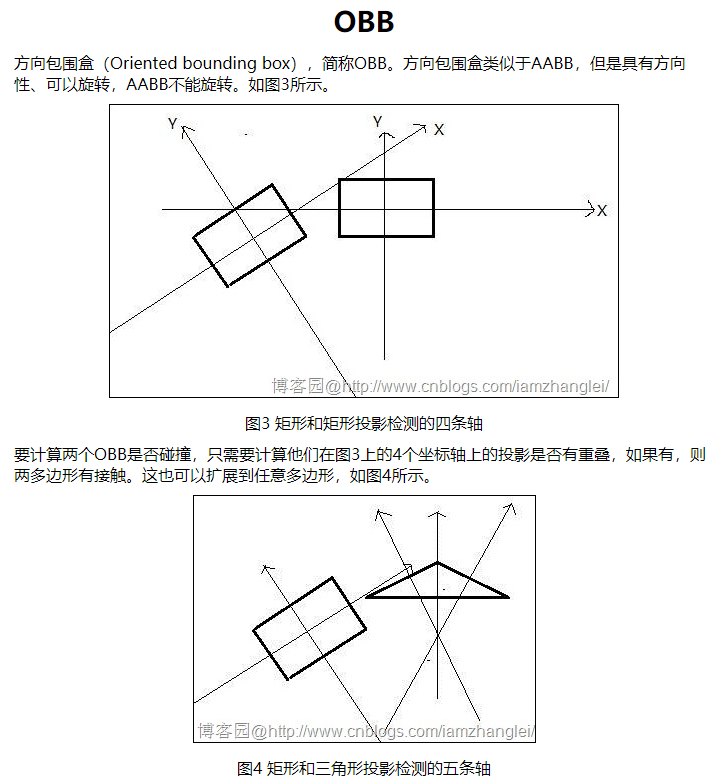
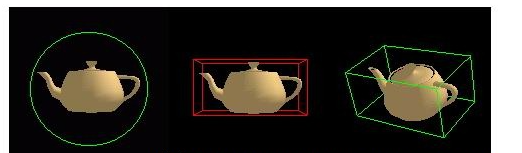
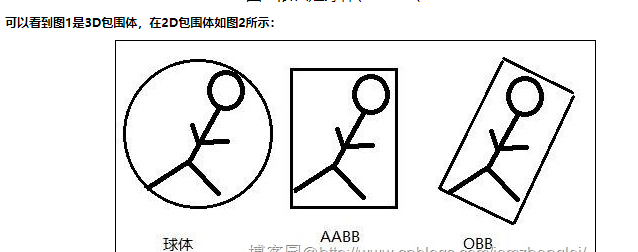
包围体是一个简单的几何空间,里面包含着复杂形状的物体。为物体添加包围体的目的是快速的进行碰撞检测或者进行精确的碰撞检测之前进行过滤(即当包围体碰撞,才进行精确碰撞检测和处理)。包围体类型包括球体、轴对齐包围盒(AABB)、有向包围盒(OBB)、8-DOP以及凸壳。如图1所示。
这里通过中心点根据公式直接得出14个一模一样的矩阵框

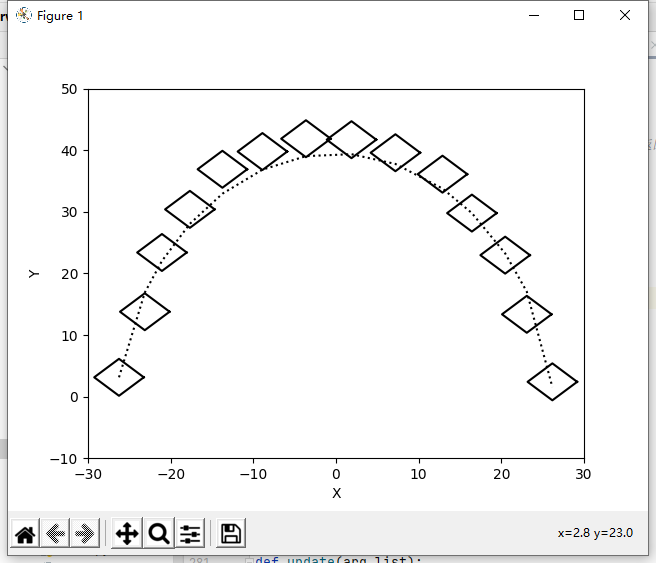
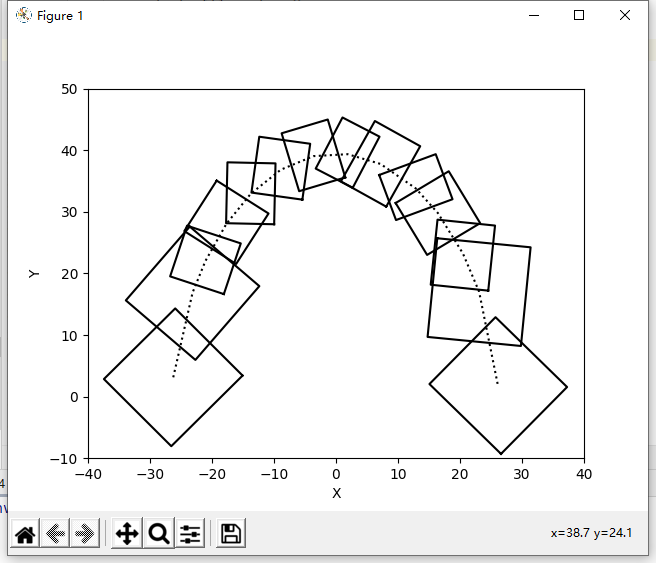
移动包围框到目标点
这里移动包围框是根据中心实时的利用公式去得到新的矩形框四个点的位置

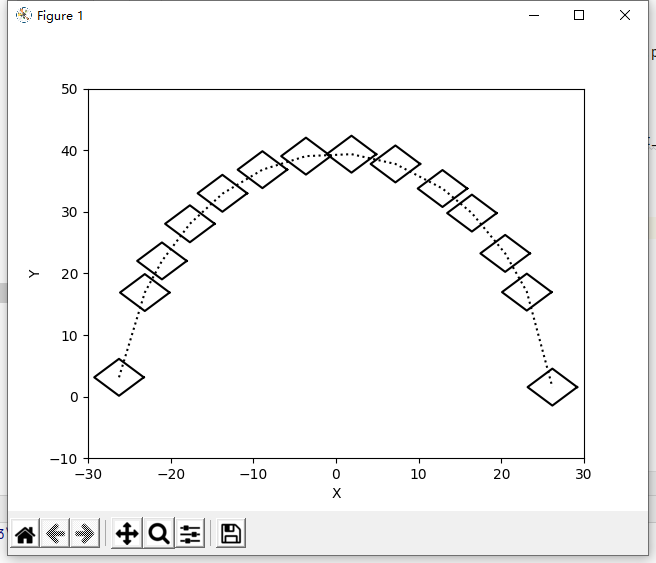
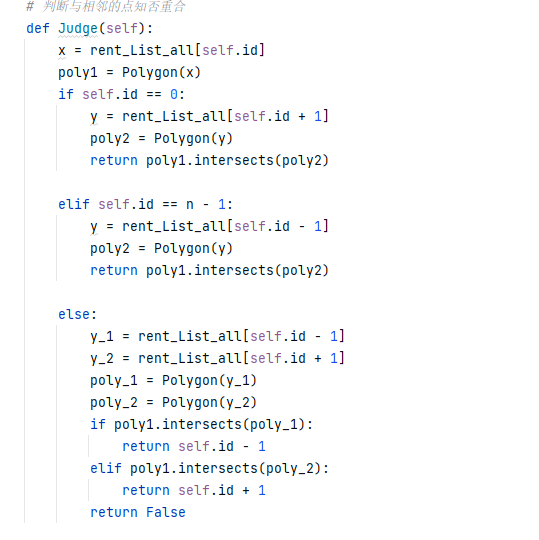
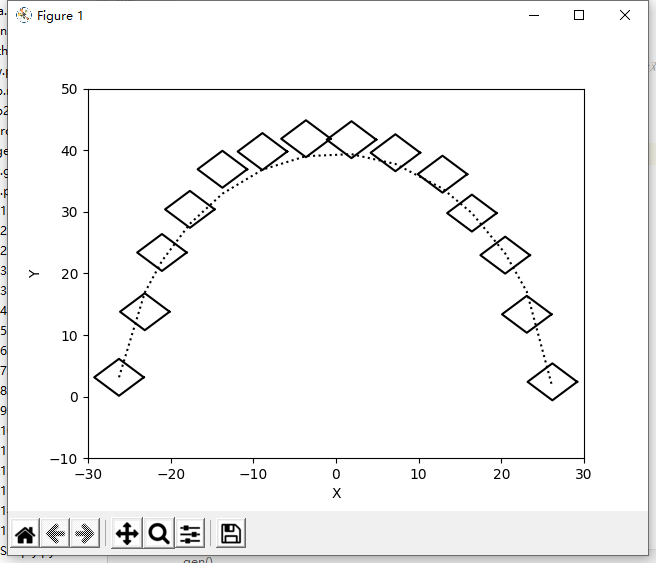
解决碰撞
- 在二维上碰撞就是两个矩形是否有交集 我们利用shapely这个库 将两个矩形的四个点输入进行即可判断是否有重合
根据新数据使用obb生成包围框
根据真实数据移动包围框