1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
| import math
from math import sqrt
import pandas as pd
import open3d as o3d
import numpy as np
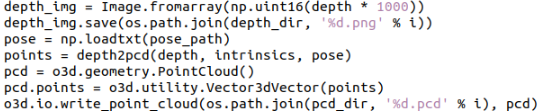
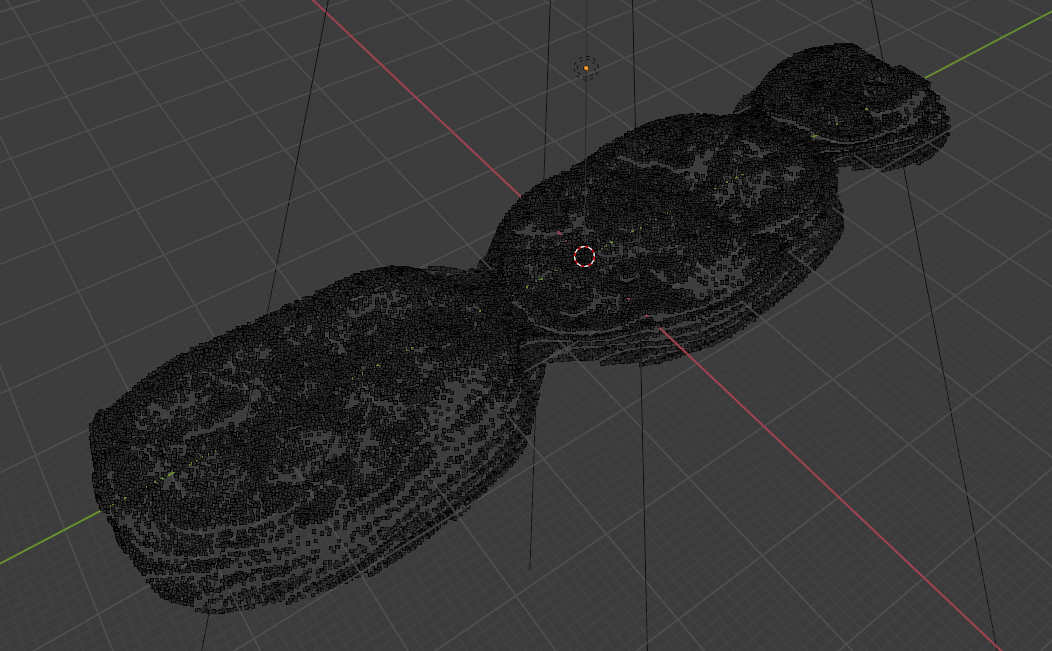
pcd = o3d.io.read_point_cloud('/home/zpp/depth_image/models/data0200.ply')
print(pcd)
all_points = np.asarray(pcd.points)
print(all_points)
obb = pcd.get_oriented_bounding_box()
obb.color = (0,1,0)
eight_points = np.asarray(obb.get_box_points())
o3d.visualization.draw_geometries([pcd, obb])
pcd_points = np.asarray(pcd.points)
min_x = np.min(eight_points[:, 0])
max_x = np.max(eight_points[:, 0])
min_y = np.min(eight_points[:, 1])
max_y = np.max(eight_points[:, 1])
min_z = np.min(eight_points[:, 2])
max_z = np.max(eight_points[:, 2])
"""
法向量n
三个点确定一个平面
"""
point1 = np.array([min_x, min_y, max_z])
point2 = np.array([min_x, max_y, max_z])
point3 = np.array([max_x, min_y, max_z])
point4 = np.array([max_x, max_y, max_z])
r = 100
point_d = []
def point_face_d(point1, point2, point3, point4, r, all_points):
AB = np.asmatrix(point2-point1)
AC = np.asmatrix(point3-point1)
N = np.cross(AB, AC)
A = N[0, 0]
B = N[0, 1]
C = N[0, 2]
D = -(A * point4[0] + B * point4[1] + C * point4[2]-r)
for p in all_points:
d = (A*p[0]+B*p[1]+C*p[2]+D)/sqrt(A**2+B**2+C**2)
point_d.append(d)
return r/C
translation_z = point_face_d(point1, point2, point3, point4, r, all_points)
all_points[:, 2] = point_d
print(all_points)
max_d = np.max(point_d)
max_x = np.max(all_points[:, 0])
max_y = np.max(all_points[:, 1])
print(max_x, max_y)
t = 2.54
nor_point_d = []
nor_point_x = []
nor_point_y = []
result = []
for d in point_d:
nor_point_d.append(round(d * 255 / max_d))
for x in all_points[:, 0]:
nor_point_x.append(round(x * 100 * t / max_x))
for y in all_points[:, 1]:
y = y + abs(min_y)
nor_point_y.append(round(y * 100 / max_y))
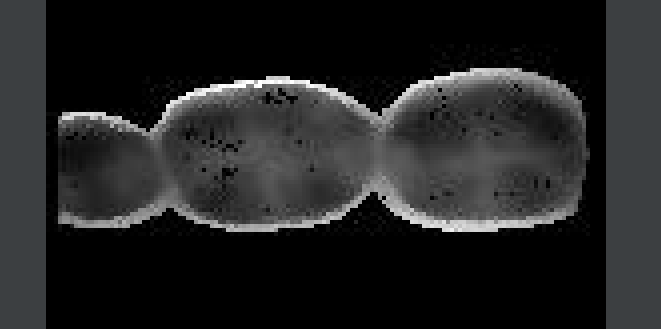
img_depth = np.zeros((int(140*t), 140), np.uint8)
for idx, d in enumerate(nor_point_d):
a = nor_point_x[idx]
b = nor_point_y[idx]
tmp = (nor_point_x[idx], nor_point_y[idx], nor_point_d[idx])
result.append(tmp)
img_depth[a, b] = d
tmp = np.array(result)
h = abs(max_z - min_z) + translation_z
ori_z = []
for z in tmp:
ori_value = h - z[2]/255*max_d
ori_z.append(ori_value)
ori_z = np.array(ori_z)
tmp[:, 2] = ori_z
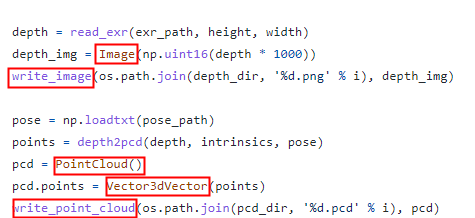
from PIL import Image
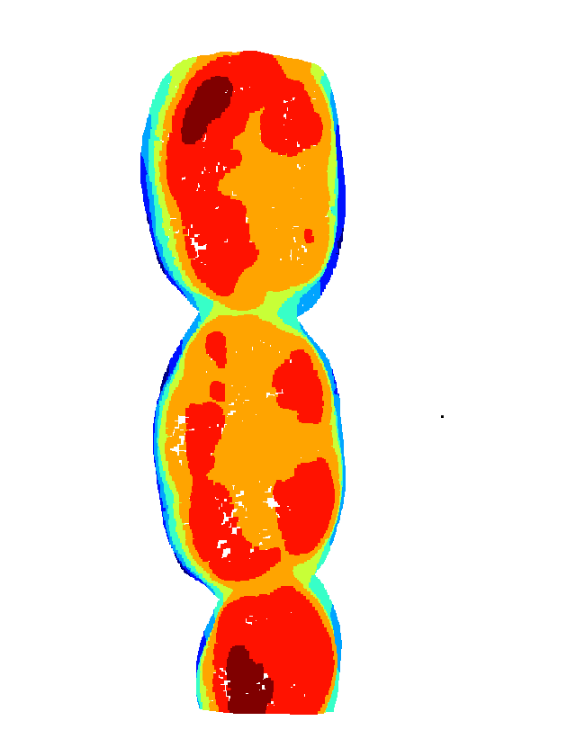
im = Image.fromarray(img_depth)
im.save("out1.jpg")
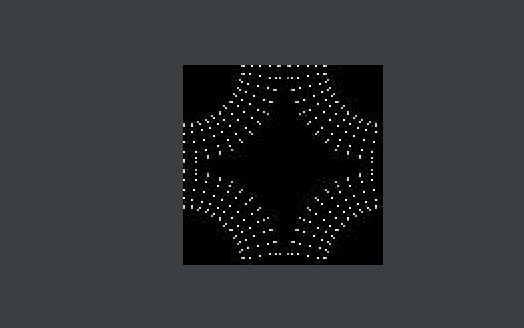
point_cloud = o3d.geometry.PointCloud()
point_cloud.points = o3d.utility.Vector3dVector(tmp)
o3d.io.write_point_cloud('/home/zpp/depth_image/models/data.ply', point_cloud)
o3d.visualization.draw_geometries([point_cloud])
|
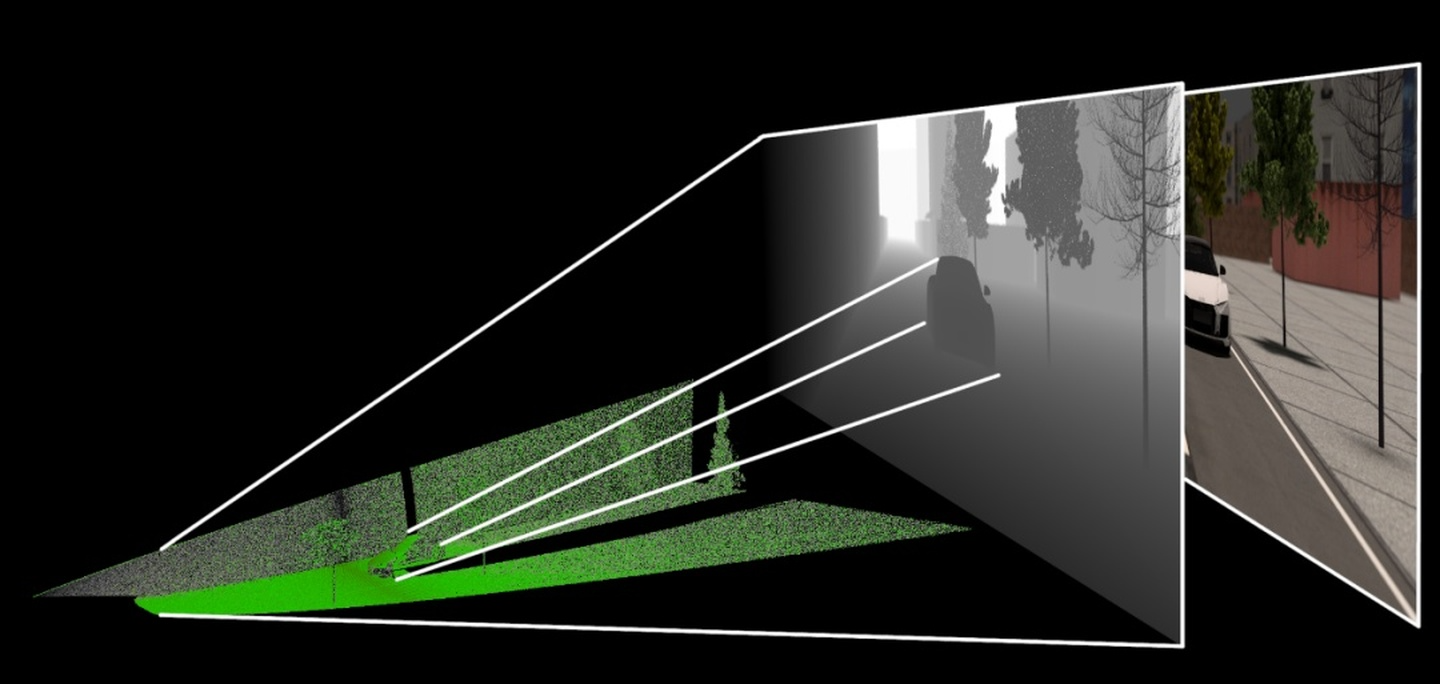
 应用场景 ……..
应用场景 ……..